



6축 교육용 또는 관절형 로봇 팔 DIY 델타 또는 카메라 로봇 팔
사양
축:6
최대 탑재량: 4kg
반복위치:±0.01mm
사용 습도:20-80%
세이지 환경: 0℃-45℃
설치 : 접지
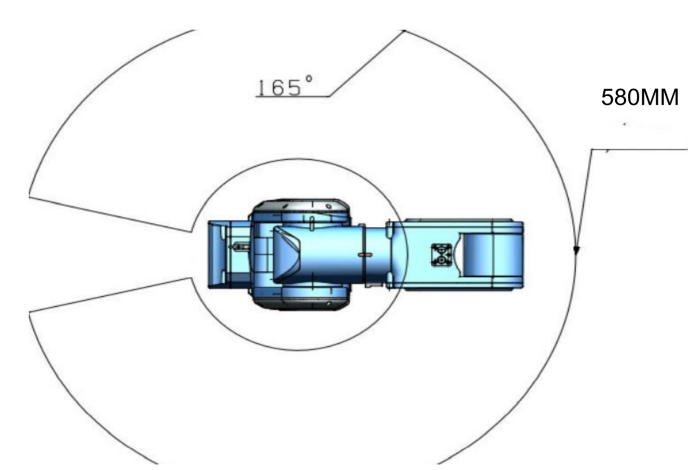
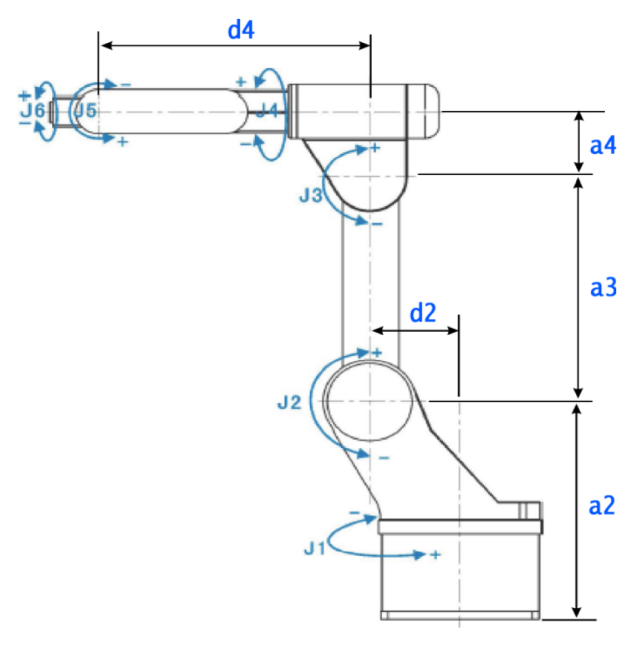
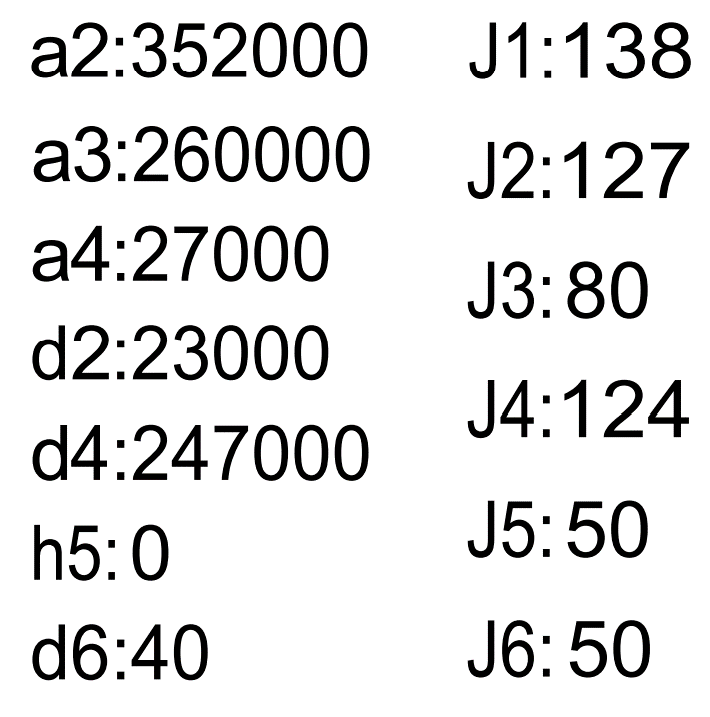
작업 범위: J1:±165°
J2:-100°~+120°
J3:+150° ~-60°
J4:±175°
J5:+130° ~-30°
J6:±180°
최대 속도: J1:260°/s
J2:250°/초
J3:250°/초
J4:250°/초
J5:200°/초
J6:760°/초
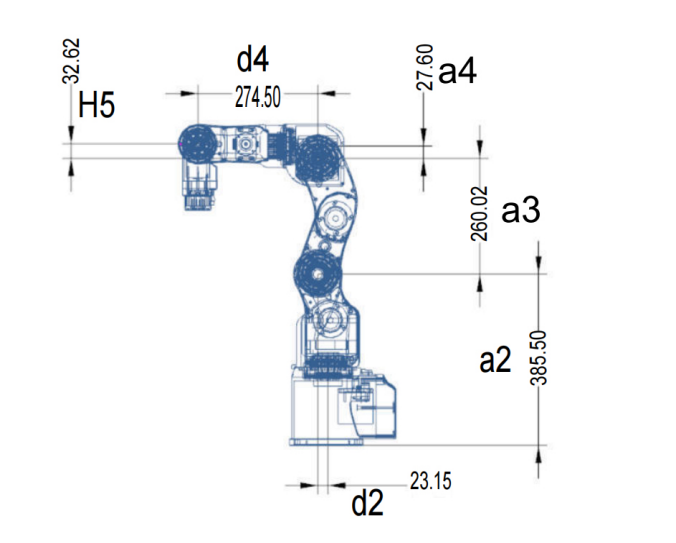
작동 범위:
기본 설치:
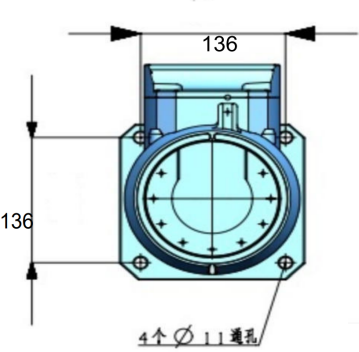
기본 설치:
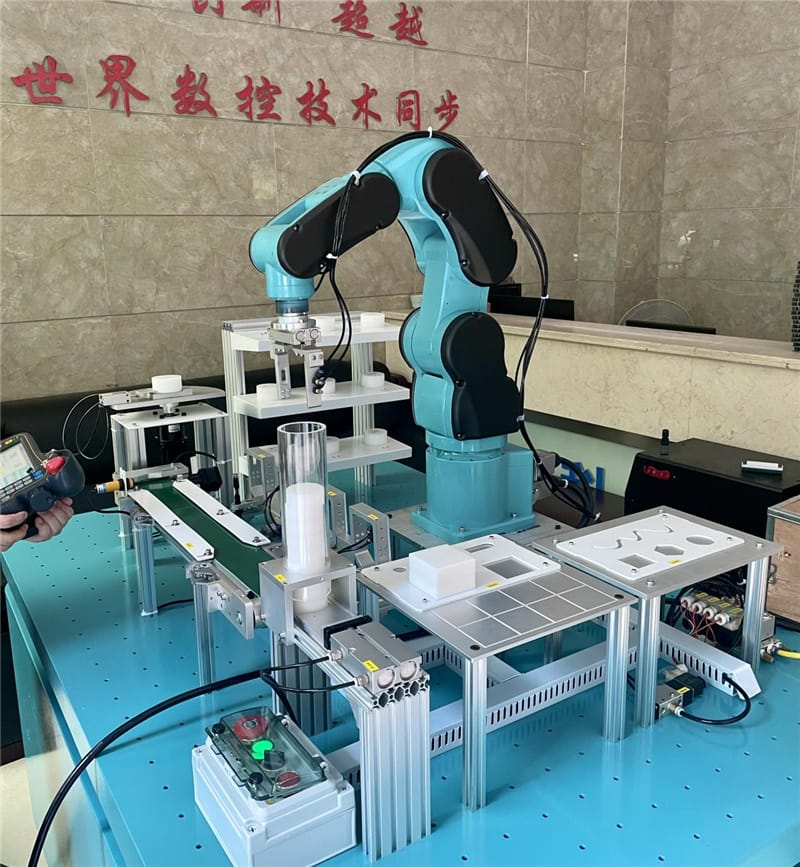
응용 프로그램
교육용 애플리케이션:
1. 로봇 시스템의 기본 구성을 연구합니다.
2. 로봇 티칭 펜던트의 프로그래밍 및 티칭 기능을 연구합니다.
3. 로봇 오프라인 프로그래밍의 기본 지식을 공부합니다.
4. 로봇 io의 동작과 응용 프로그래밍을 연구합니다.
5. 로봇 시각 응용 프로그램을 연구하다
상업 장면: 로봇 아이스크림 로봇 바텐더 로봇 커피 로봇 밀크티 경공업 장면: 측정 분배 검사 분류
제품 특징
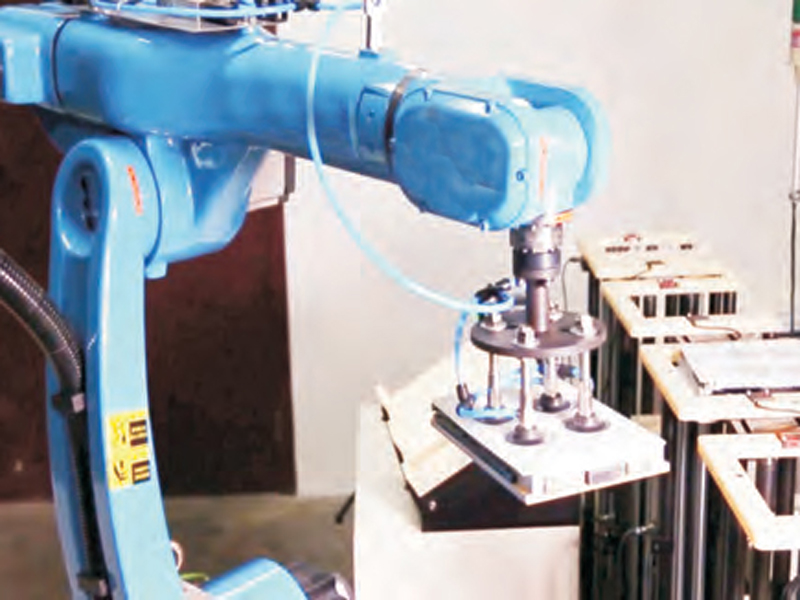
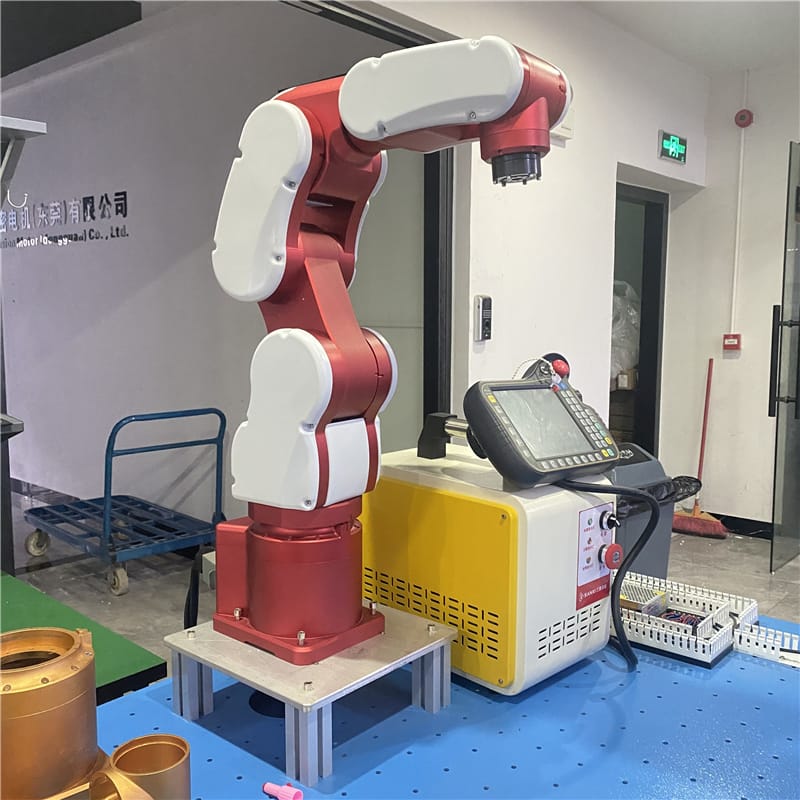
로봇 팔:로봇 팔은 CNC 가공 센터를 통해 알루미늄 주물로 제작되었으며, 표면은 플라스틱으로 분사되어 아름다운 외관을 갖추고 있습니다.
예비 케이블 구멍: 로봇 팔에는 예비 케이블 구멍이 있어 보기에도 좋고 조작기의 작동을 방해하지 않습니다. 기관 끝부분은 포트와 데이터 케이블 커넥터를 위해 예비되어 있습니다.
제어 패널: 대형 LCD 디스플레이, 고객 요구에 따른 언어 표시 방식, 간편하고 명확한 조작 및 프로그래밍, 온라인 매개변수 수정 및 고장 자가 진단 기능을 갖추고 있습니다.
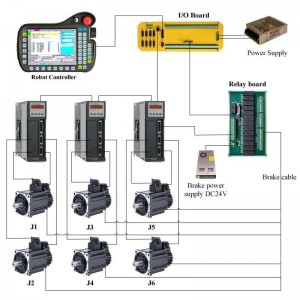
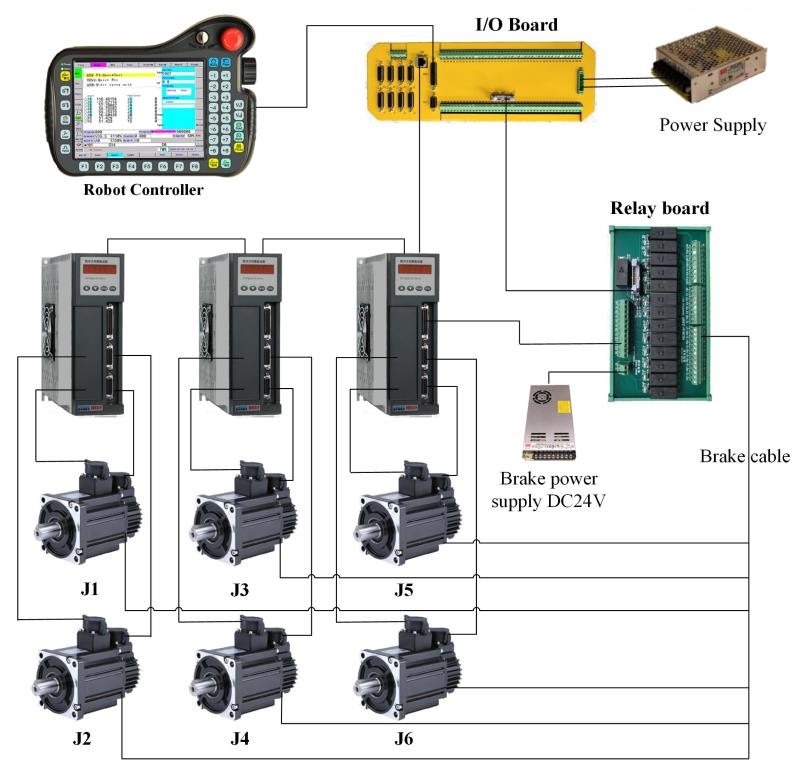
로봇 제어 캐비닛: 지능형 모션 제어 시스템은 산업용 컴퓨터 기술을 채택하고, 전자동 서보 모듈은 로봇의 각 관절의 AC 서보 모터에 구동력을 제공합니다.
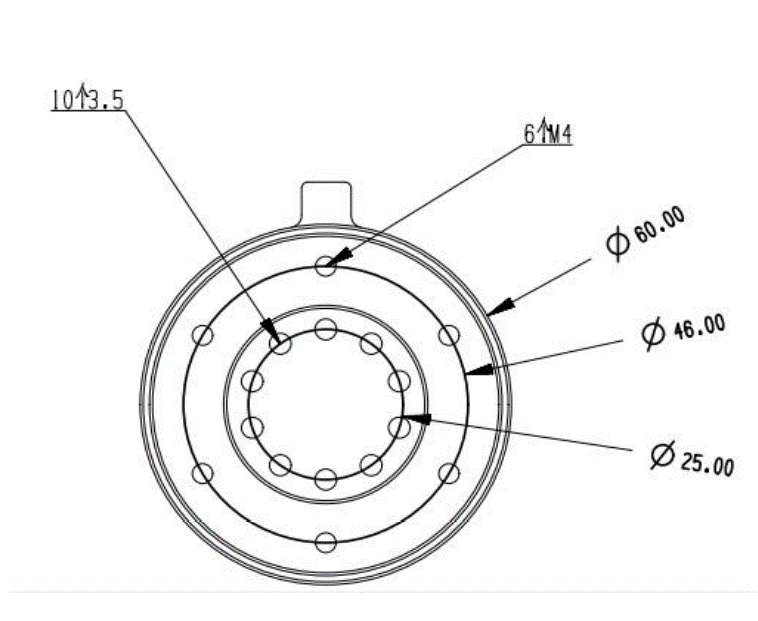
로봇 고정 장치: 툴링 고정 장치는 사용자 정의 요구 사항에 따라 다른 중력과 수량을 선택할 수 있으며, 조정이 쉽고 사용 범위가 넓은 엔드 플랜지에 설치됩니다.